지난 편 에서 ROS2 첫 노드 + STM32 PWM 까지 했다. 오늘은 USB-UART 컨버터가 아직 안 와서 진도를 더 못 빼고, 하드웨어 쪽에서 할 수 있는 일들을 했다. 코딩 0줄, 납땜·자석·전압 측정만 한 날.
임베디드는 참 돈이 많이 드는 거 같다. 엊그제 다이소 갔는데 또 가서 살 걸 샀다.
Table of contents
Open Table of contents
1. 로커 스위치 도통 테스트 — DPDT 양극성 차단
먼저 멀티미터를 고치고 로커 스위치 도통 테스트를 했다.
처음엔 단순하게 봤다:
- I 쪽 ON → 5, 6 통함
- II 쪽 ON → 1, 2 통함
- OFF → 안 통함
깔끔하게 끝났다 싶었는데, AI 가 옆에서 의심해서 다시 확인해봤다. 실제론 이랬다:
- I 쪽 ON → 2-3 도통, 5-6 도통 (두 폴 동시)
- II 쪽 ON → 1-2 도통, 4-5 도통 (두 폴 동시)
- OFF → 안 통함
처음에 한 폴만 보고 끝낼 뻔. 이게 DPDT (Double Pole Double Throw) 양극성 차단 구조다 — 한 방향으로 켜질 때 두 폴이 동시에 도통돼야 한다. 양극성 차단이라는 말은 +선과 −선을 동시에 끊는다는 뜻이라 더 안전하다.
AI 가 한 번 더 짚어주지 않았으면 한쪽만 보고 결선했을 수도 있다. 1인 작업의 약점이 이런 데서 드러난다.
2. 배터리 + 로커 스위치 결선 계획
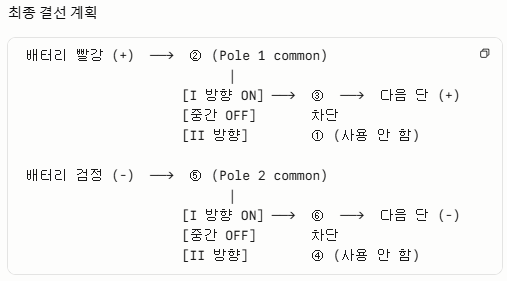
배터리와 로커 스위치를 어떻게 연결할지 손으로 그렸다. 입력은 배터리 +극, 출력은 STM32·모터드라이버 등 부하 쪽으로 가야 한다.
3. 납땜 — 오랜만에 똥손 부활
겨우 납땜해서 끝냈다. 오랜만에 납땜이기도 하고 집에서 납땜하는 게 익숙하지가 않아서 그런가, 원래도 똥손인데 땀 뻘뻘 흘리면서 겨우겨우 마무리했다.

4. 배터리 전압 측정 — 10.61V
멀티미터로 전압을 쟀을 때 10.61V 가 나왔다 (손이 두 개라 멀티미터 사진은 못 찍었다).
찾아보니까 만충일 때 12.6V 고, 출하 시 50% 충전 상태 가 정상이라고 한다. 보관·운송 안전을 위해 일부러 절반만 충전해서 보낸다는 것. 10.61V 면 정상 범위.
5. 부품 추가 구매 — 1주일 대기
이후엔 스위치 출력단을 부하 쪽에 연결해야 하는데 케이블을 또 사야 한다. 하드웨어 쪽 일한다고 진이 빠지는 것도 있는데, 부품 구매 때문에 진도 못 나가는 건 좀 빡친다.
일단 이번에 구매한 것:
- 퓨즈홀더
- 미니 퓨즈
- 단자대
- AWG20 실리콘 케이블
퓨즈홀더랑 미니 퓨즈는 구하기도 어려웠고 해외배송이라 1주일 뒤에 온다. 그 사이에 다른 걸 먼저 하기로 했다.
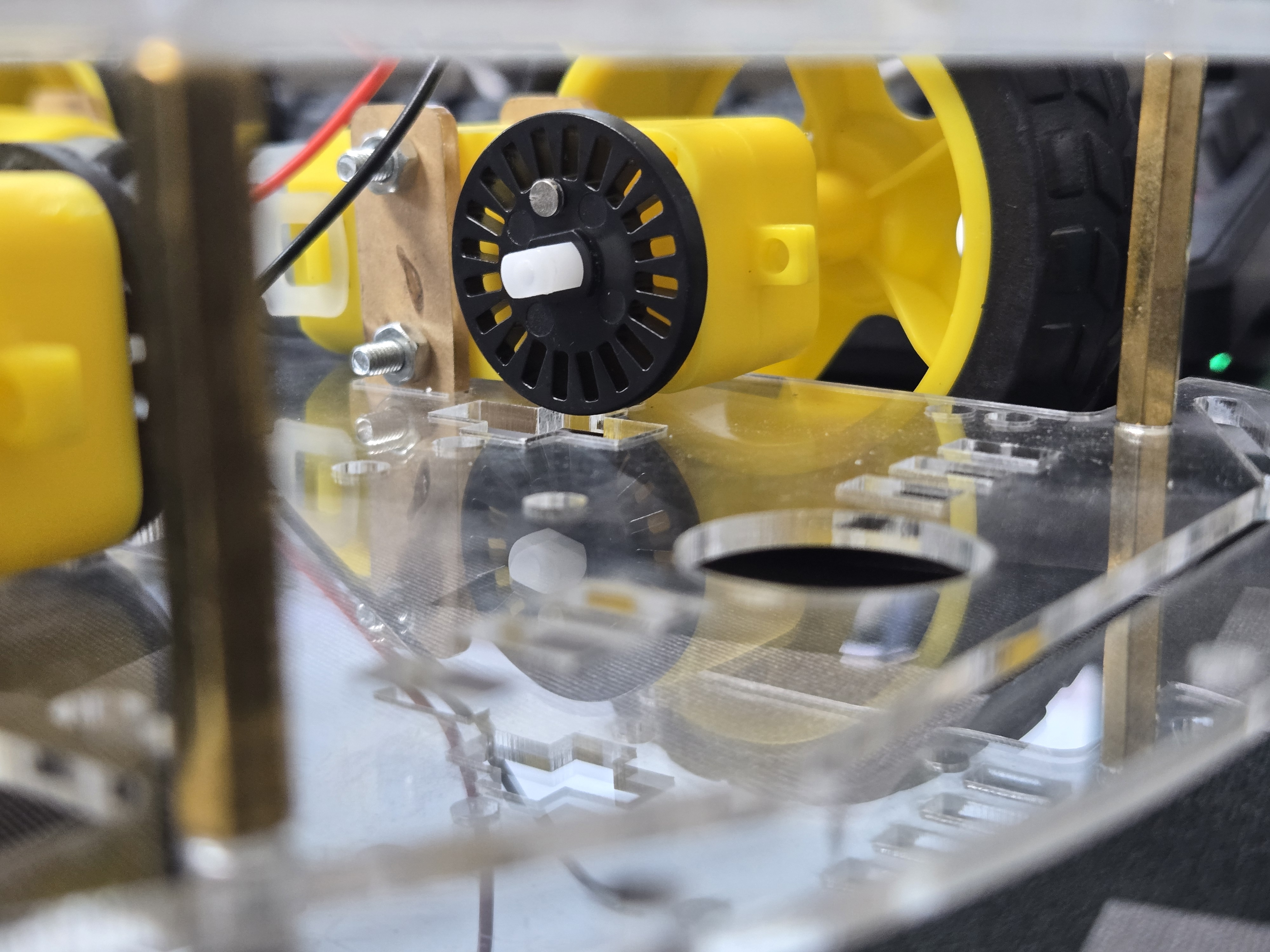
6. 홀 센서용 네오디움 자석을 휠에 붙이기
USB-UART 컨버터가 아직 안 왔으니 다른 거. 네오디움 자석을 휠 안쪽에 붙이는 작업.
홀 센서가 뭔지 먼저 정리
내가 홀 센서의 원리를 모르다 보니 어디에 자석을 붙여야 되는 건지 통 알 수가 없었다. 정리하면:
- 홀 센서 = 자석 감지기
- 자석이 가까이 오면 → 출력 신호 LOW
- 자석이 멀어지면 → 출력 신호 HIGH
이걸 이용해 휠 안쪽에 작은 네오디움 자석 을 붙이고, 휠 옆에 홀 센서 를 둔다. 휠이 한 바퀴 돌 때마다 자석이 센서를 한 번 지나가니까 카운트가 올라간다. 만보기와 같은 원리. 그걸로:
- 거리 측정 (휠 둘레 × 회전수)
- 속도 추정 (단위 시간당 카운트)
- 위치 추정 (좌·우 휠 카운트 차이로 회전 각도 계산 — 미분 구동 odometry)
까지 가능해진다. 결국 ROS2 의 /odom 토픽을 채울 데이터 소스가 이 자석 하나에서 시작된다.
핀셋에 자석이 붙어서 당황
네오디움 자석이 너무 작아서 핀셋으로 집어야겠다 싶었는데, 핀셋에 자석이 그대로 붙었다. 당황. 다행히 핀셋에 자석이 붙는 힘보다 접착제의 힘이 더 강해서, 자석이 핀셋에 붙은 상태로 접착제를 발라 휠에 옮겨붙이는 식으로 작업했다.
오늘 한 것
- 로커 스위치 도통 테스트 — DPDT 양극성 차단 구조 재확인 (AI 가 도와줬다)
- 배터리 + 로커 스위치 결선 계획 + 납땜
- 배터리 출하 전압 점검 (10.61V → 50% 충전 상태 정상)
- 부품 추가 발주 (퓨즈홀더 · 미니 퓨즈 · 단자대 · AWG20 케이블, 해외배송 1주일)
- 휠 안쪽에 네오디움 자석 부착 (홀 센서 + 엔코더 작업 준비)
다음 할 것
- USB-UART 컨버터 도착 시 UART 통신 확인 (Pi 5 ↔ STM32)
- 홀 센서 결선 + 회전 카운트 첫 측정
- 회로도 정리 (지금은 머릿속 + 노트에만 있음)
더 공부해볼 것
1. DPDT 양극성 차단의 의미
- DPDT = Double Pole Double Throw — 폴(접점 쌍) 2개를 동시에 양쪽 중 하나로 던지는 스위치
- 양극성 차단 = +선과 −선을 동시에 끊음 → 한 쪽만 끊을 때 보다 안전 (전기적 격리 확실)
- AC 회로에서 더 흔히 쓰이지만, DC 에서도 모터·배터리 차단용으로 사용
- SPST / SPDT / DPST / DPDT 차이 정리 — Wikipedia
2. 출력단 병렬 결선 — 한 점에서 모이는 방식
결선 방법을 모르다 보니까 처음엔 조직도마냥 한 선에서 3개를 나눠서 결선하나 했는데, 그게 아니고 한 포인트에서 모이는 것 이었다.
우리 프로젝트의 예로 들면: 입력 케이블 1개와 출력 케이블 3개가 있다고 했을 때, 4개 케이블의 노출된 구리선을 한 점에 모두 모으고 꼬아준다. 그 다음 솔더링하면 모든 가닥이 한 덩어리가 되면서 병렬이 된다.
“병렬은 하나의 점에서 나눠진다” 라고 머릿속에 그려졌는데, 한 점에서 뭉쳐서 병렬을 구현하는 게 뭔가 재밌게 느껴졌다. 그리고 블로그 글도 찾아봤는데 뭔가 예술 같다고 느껴졌다.
3. 홀 효과(Hall effect) 와 홀 센서 종류
- 홀 효과 원리 — 자기장 안에서 전류가 흐르는 도체에 수직 방향으로 전압이 발생
- 센서 출력 형태:
- 디지털 (Latch / Switch) — A3144 같은 것. 자석 가까이 = LOW, 멀어짐 = HIGH
- 선형 (Linear / Analog) — 자기장 세기에 비례하는 아날로그 출력
- 단극(unipolar) vs 양극(bipolar) — N극·S극 중 어느 쪽에 반응하는가
- 우리가 쓸 건 디지털 단극 (A3144 시리즈) — 회전 카운트용
4. 리튬 배터리 출하 충전 상태가 50% 인 이유
- 만충(100%) 상태로 장기 보관하면 전해질 분해 + 셀 수명 단축
- 0% 로 보관하면 자체 방전으로 cut-off 전압 이하로 떨어져 영구 손상
- 그래서 30~50% 가 보관 sweet spot. 항공 운송 규정도 30% 이하로 제한
- 도착 후엔 곧 만충해서 사용
회고
오늘은 코딩 0줄, 손으로만 한 날. 임베디드 사이드 프로젝트의 단점이 그대로 드러난 날이기도 하다 — 부품 하나 안 오면 다음 단계가 막힌다. SW 만 하면 npm install 한 줄로 다음 영역으로 갈 수 있는데, HW 는 1주일을 기다려야 한다.
그래도 AGV 1편(설치) → 2편(첫 노드) → 3편(전원·센서 하드웨어) 으로 트랙이 자연스럽게 자율주행 로봇의 layer 를 따라 내려가고 있다. 다음 편은 USB-UART 도착 후 ROS2 listener 의 좌·우 속도 명령을 STM32 에 전달하는 첫 통합이 될 예정.